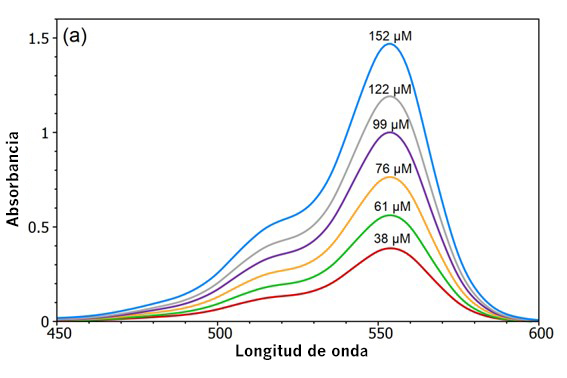
La ley de Lambert o también conocida como la ley de beer lambert establece la relación empírica que conecta laabsorción de la luzy las propiedades de un material mientras viaja la luz.
Esta ley fue descubierta por varias formas, ya sean diferentes e independientes, el primero en descubrirlo fue el francés Pierre Bouguer en 1729.
La ley de beer-lambert está compuesta por la ley de Beer y de Lambert. Ambas leyes se basan en el comportamiento de la radiación absorbida por una muestra. La diferencia que se encuentra entre estas dos leyes es que la ley de Lambert predice el efecto que crea el espesor del medio, mientras la ley de beer implanta el efecto de la concentración, las dos sobre la fracción de radiación la cual absorbe.
La ley de Lambert dice que la pérdida de la intensidad en el momento en el que se encuentra en el medio es directamente proporcional a la intensidad y la longitud del recorrido. En otras palabras, si la intensidad aumenta, la longitud aumenta y si la intensidad disminuye la longitud con ella.
La ley de Beer-Lambert como su principal utilidad es conocer la determinación de las concentraciones de las disoluciones. En su contra afirma que la totalidad de la luz que emana de la muestra puede disminuir debido a los tres fenómenos siguientes:
- Concentración al número de materiales que absorbe en el momento de su trayectoria.
- La distancia del trayecto óptico à la distancia que tiene la luz para poder atravesar el elemento.
- Absorbencia o extinción à probabilidad que tiene un fotón en ser absorbido por la muestra.
Esta ley establece la conexión que se encuentra entre la absorción que hay en la radiación junto al densidad de la muestra.
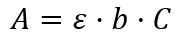
Cuál es la fórmula de la ley de Beer Lambert
Los parámetros que se tienen en cuenta en esta ley además de las propiedades del material son:
- A: absorbancia de la disolución a una longitud de onda
- ɛ: coeficiente de extinción molar (M-1 · cm-1)
- b: longitud de paso de la cubeta (cm)
- C: concentración de la disolución
¿Qué es la transmitancia y la absorbancia?
En la ley de Beer – Lambert encontramos dos conceptos: La absorbancia y la transmitancia.
- La absorbancia es la cantidad de radiación que absorbe un material.
- La transmitancia es la proporción de luz que traspasa un material en un tiempo determinado.
La ley de Watt
La ley de Watt fue inventada por James Watt un ingeniero nacido en Escocia el enero de 1736. Su ley está directamente relacionada con el desarrollo de la máquina de vapor en 1769 que fue patentada y empleada en la primera revolución industrial.
Watt es una palabra inglesa la cual significa Vatio. Por otro lado, es la más utilizada para medir la potencia de sistemas. La potencia es la energía ya sea consumida o producida en un periodo de tiempo limitado.
Esta ley afirma que: “la potencia eléctrica es directamente proporcional al voltaje de un circuito y a la intensidad que circula por él. “
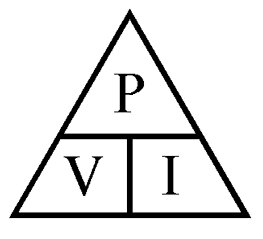
Fórmulas de la ley de Watt
En la obtención de la fórmula de esta ley, podemos conseguirla de la pirámide, como la de la ley de OHM.
P = V·I
V = Tensión (Volts)
I = Intensidad (amperios)
P = Potencia (vatios)
La ley de Watt es la potencia eléctrica que tiene un componente. Esta potencia eléctrica equivale a 1J. El Watt además de esa definición también es una unidad la cual se encarga de medir la energía absorbida por un elemento en un tiempo en concreto.
Más tarde del descubrimiento de la ley de Watt, esta se fusionó con la ley de OHM. Si lo que no se conoce la ley inventada por James Watt es la tensión este valor puede ser sustituido por el mismo de la ley de ohm. A continuación, lo podemos ver claramente.
Para obtener ley de Watt sin el valor de la tensión debemos seguir las siguientes fórmulas:
P = V · I
P = (I · R) · I
P = I2 · R
En el caso de que la potencia sea positiva significa que el elemento que estamos calculando está consumiendo energía, en cambio si la potencia es negativa significa que está creando energía.
Aplicaciones de la ley en la vida cotidiana
En nuestra vida cotidiana empleamos la ley de Watt para conocer el voltaje y la potencia de una bombilla o en mayor medida el cableado de un edificio.
Las aplicaciones de esta ley son muy diversas, pero las más comunes son:
Conocer la cantidad de energía que puede producir un generador eléctrico
Medir la potencia eléctrica de un edificio
Servomecanismos
El servomecanismo inicial se desarrolló a lo largo del siglo XIX junto a los reguladores de temperatura y de velocidad enfocados a las turbinas de agua, diseñadas por Woodward en 1870. Fue inventado por SS Great Eastern el cual diseñó la patente. Sin embargo, el pionero fue McFarlane.
El servomecanismo, también conocido como servomando es un instrumento que nos da la posibilidad de transmitir una magnitud física, pudiendo mantener una proporción entre el mando y el resultado.
Los servomecanismos tienen varias ventajas como por ejemplo ser un instrumento siempre constante y manteniendo el mismo ritmo. Además, pueden funcionar a grandes velocidades. Por otro lado, se puede aumentar la corriente mientras se pretende hacer girar el motor.
Podemos encontrar varios tipos de servomandos según el tipo de motor: Mecánico, hidráulico, neumático, eléctrico y electrónico.
Todos los servomecanismos tienen unas características en común, las cuales las podemos ver a continuación.
- Artificial → construido por el hombre
- Sensorial → se puede percibir por los estímulos que nos rodean
- Controlado → controla tanto la velocidad como la posición
- Actuador → puede producir movimientos por sí mismo
Tipos de servomotores:
- Servo de rotación posicional: este tipo de servo es el que más se utiliza. El servo de rotación posicional tiene límites que se encargan de cuidar del sensor de rotación para que este gire de más de sus topes físicos establecidos.
- Servo de rotación continua: este servo es como el servo de rotación posicional, pero a diferencia de ese, este no tiene tope de dirección en el momento de rotar.
- Servo lineal: El servo lineal está compuesto de engranajes adicionales además del servo de rotación posicional.
¿Dónde podemos encontrar los servomecanismos?
Los servomotores los podemos encontrar en varias industrias, pero las más importantes son:
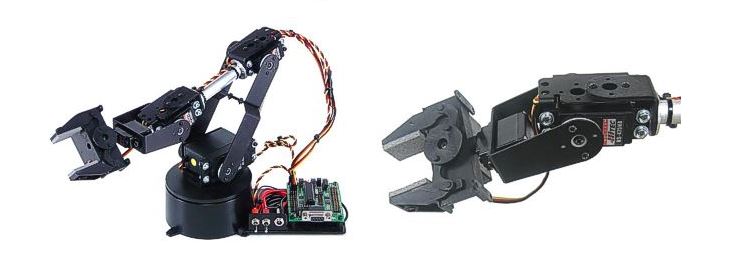
Robótica= se enfoca en el control automático. Más específicamente en la robótica los podemos encontrar en cualquier brazo robot que se necesitan en una cadena de montaje. El funcionamiento se debe a unos sistemas mecánicos y eléctricos que producen los movimientos necesarios para que la máquina funcione. Cualquier servomecanismo está compuesto por sensores (ya sean de velocidad o de posicionamiento), de un mecanismo de retroalimentación, un engranaje y un controlador. En el caso de que se necesite más potencia se requerirá utilizar un servomecanismo hidráulico o una bomba hidráulica.
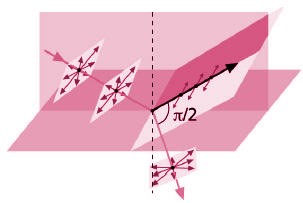
Polarización
La polarización es la propiedad que poseen todas las ondas transversales que produce una vibración de estas con más de una orientación. Podemos encontrar la directa y la inversa.
La polarización directa se produce cuando la conexión positiva (+) está conectada al ánodo y la conexión negativa (-) al cátodo. Por otro lado, el borne (+) ha de ser superior al borne (-). La tensión externa de esta propiedad directa se da debido a la fusión de P y N. Más específicamente a la conexión negativa al semiconductor tipo N y la conexión positiva al semiconductor P. Esta tiene un potencial de barrera reducida, una corriente directa mayor y una resistencia inferior que la inversa.
La polarización inversa tiene el terminal negativo a la zona P, mientras que tiene el terminal positivo en la zona N. A diferencia de la polarización inversa tiene un potencial de barrera fuerte, una corriente directa menor y una resistencia mayor.
Métodos para medirla
Los métodos para medir la polarización de la luz son:
La de reflexión: se da en el momento en el que la luz natural penetra en la superficie que se encuentra en la separación entre dos medios.
Atreves la dispersión: sucede cuando las ondas se irradian y dispersan en el momento en el que la luz atraviesa el material.
La de refracción: sucede cuando el rayo de luz traspasa dos medios.
La de transmisión: emplea filtros polaroid, los cuales tienen la función de bloquear las ondas magnéticas y eléctricas.
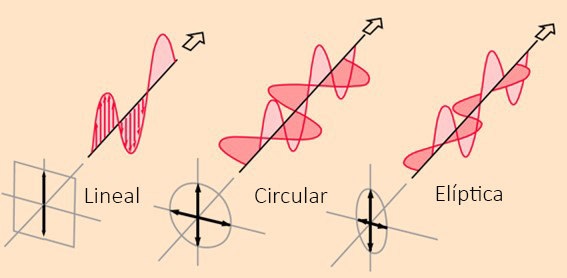
Tipos de polarización
Nos podemos encontrar con diferentes tipos de polarización dependiendo del desfase que encuentren:
Elíptica: tiene unas ondas las cuales se desplazan mediante una trayectoria en forma de elipse.
Lineal: las frecuencias se mueven en el mismo plano de forma temporal. Dentro de esta polarización podemos encontrar:
Horizontal: su campo eléctrico de onda se encuentra horizontal a la superficie terrestre.
Vertical: tiene un campo eléctrico de onda perpendicular a la superficie.
Circular: sus frecuencias se mueven haciendo una rotación sobre su propio eje. Dentro de esta clasificación podemos encontrar:
Dextrógira: su movimiento giratorio está hacia la derecha.
Levógira: su movimiento giratorio está hacia la izquierda.
La polarización se puede aplicar en varias aplicaciones. Sin embargo, las más frecuentes son: para diferenciar las ondas transversales y longitudinales y para la espectroscopia infrarroja.
Esta web utiliza cookies para que podamos ofrecerte la mejor experiencia de usuario posible. La información de las cookies se almacena en tu navegador y realiza funciones tales como reconocerte cuando vuelves a nuestra web o ayudar a nuestro equipo a comprender qué secciones de la web encuentras más interesantes y útiles.
Cookies estrictamente necesarias
Las cookies estrictamente necesarias tiene que activarse siempre para que podamos guardar tus preferencias de ajustes de cookies.
Listado cookies (nombre - duración - finalidad)
moove_gdpr_popup - 1 año - Guarda información sobre l'acceptación de cookies
Si desactivas esta cookie no podremos guardar tus preferencias. Esto significa que cada vez que visites esta web tendrás que activar o desactivar las cookies de nuevo.
Cookies analíticas
Esta web utiliza las siguientes cookies adicionales:
(Lista aquí las cookies que estás utilizando en la web.)
Listado cookies (nombre - duración - finalidad)
_ga - 2 años - se utiliza para distinguir usuarios
_gat - 1 minuto - se utiliza para limitar el porcentaje de solicitudes
_gid - 24 horas- se utiliza para distinguir usuarios
¡Por favor, activa primero las cookies estrictamente necesarias para que podamos guardar tus preferencias!